Application for LocalizeMUSIC with dynamic reconfigure
Overview
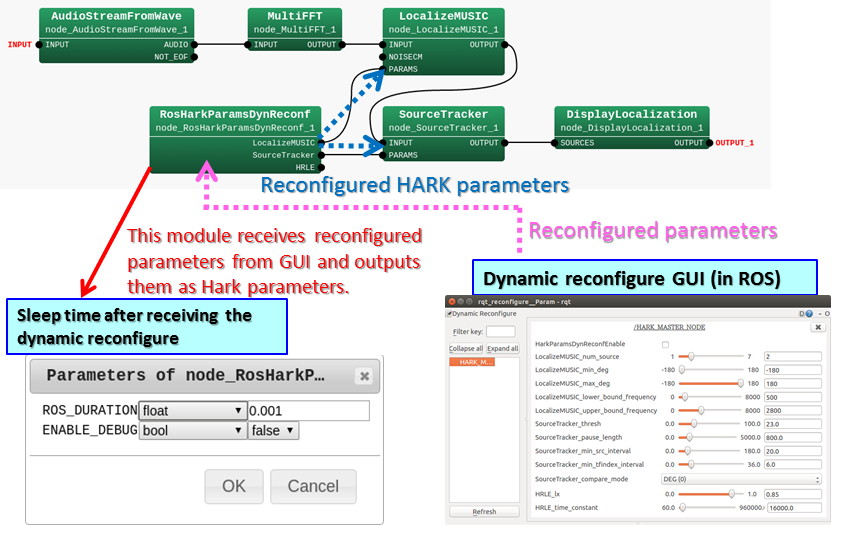
- Parameters for sound source localization (LocalizeMUSIC and SourceTracker) are dynamically reconfigured.
- HARK dynamic reconfigure module (RosHarkParamsDynReconf) subscribes the GUI reconfigure.
- RosHarkParamsDynReconf sends the most recent parameters to LocalizeMUSIC and SourceTracker.
Main Sheet Configuration
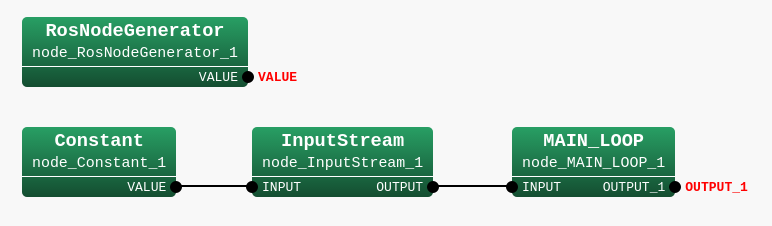
- Required Modules
- RosNodeGenerator
- Constant
- InputStream
- MAIN_LOOP (Same as LOOP0 in the previous tutorials. This appears after you create iterator sheet.)
RosNodeGenerator
All description is available at Publishing/Subscribing msg type Topics.
Constant
All description is available at Application of publishing/subscribing HARK std messages.
InputStream
All description is available at Application of publishing/subscribing HARK std messages.
MAIN_LOOP
All description is available at Application of publishing/subscribing HARK std messages.
Iterator Sheet Configuration
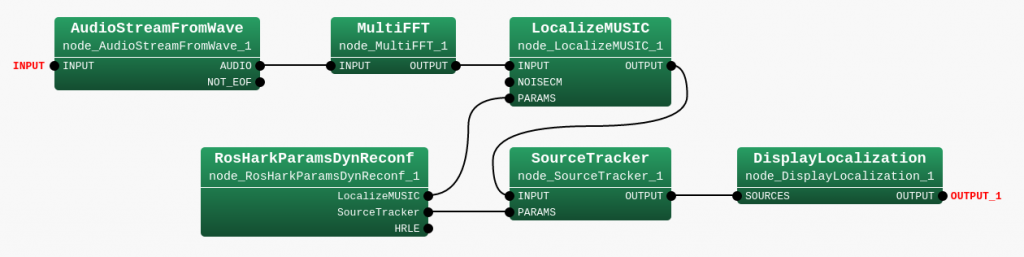
- Required Modules
- AudioStreamFromWave
- MultiFFT
- LocalizeMUSIC
- SourceTracker
- DisplayLocalization
- RosHarkParamsDynReconf
AudioStreamFromWave
All description is available at Application of publishing/subscribing HARK std messages.
MultiFFT
All description is available at Application of publishing/subscribing HARK std messages.
LocalizeMUSIC
All description is available at Application of publishing/subscribing HARK std messages.
SourceTracker
All description is available at Application of publishing/subscribing HARK std messages.
DisplayLocalization
All description is available at Application of publishing/subscribing HARK std messages.
RosHarkParamsDynReconf
- Module Description
This module subscribes all reconfigurable HARK parameters from ROS dynamic reconfigure parameter server.
This module outputs the most recent subscribed HARK parameters.
- Module Location
Node list > HARK:ROS:Utility > RosHarkParamsDynReconf
- Property settings
| Name | Type | Value | Explanation |
|---|---|---|---|
| ROS_DURATION | float | 0.001 | Minimum interval of ROS topic subscription |
| ENABLE_DEBUG | bool | false | Pring debug message or not |
ROS_DURATION is only valid if the ROS_DURATION is longer than HARK interval.
Set ROS_DURATION small value so that HARK can work with desired interval.
- Reconfigurable Parameters
| Module Name | Property Name |
|---|---|
| LocalizeMUSIC | NUM_SOURCE |
| LocalizeMUSIC | MIN_DEG |
| LocalizeMUSIC | MAX_DEG |
| LocalizeMUSIC | LOWER_BOUND_FREQUENCY |
| LocalizeMUSIC | UPPER_BOUND_FREQUENCY |
| SourceTracker | THRESH |
| SourceTracker | PAUSE_LENGTH |
| SourceTracker | MIN_SRC_INTERVAL |
| HRLE | LX |
| HRLE | TIME_CONSTANT |
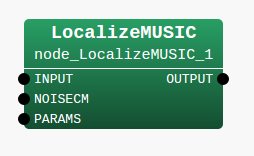
Enabling Hidden Input Terminals
In the above figure, “LocalizeMUSIC” and “SourceTracker” have “PARAMS” input terminals.
Originally, both modules don’t have “PARAMS” input terminals.
Actually, both modules have “PARAMS” as “hidden” input terminals , and the dynamic reconfigure function uses the hidden terminals.
This section describes how to add hidden terminals.
First, right click this node.
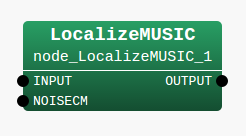
Click “Add Input” in the popup menu,
Add “PARAMS” in the Name form, then press “Add”.
You will see like following.
Do the same thing for the SourceTracker.
Examining the network file
Save the network file before closing [e.g.) LocalizeMUSIC_with_HarkMsgsDynReconf.n ]
Open a new terminal and type
roscore
Prepare one recorded wave file for the evaluation (YOUR_WAV.wav).
Go back to the previous terminal and run the HARK network file
./LocalizeMUSIC_with_HarkMsgsDynReconf.n YOUR_WAV.wav
Open a new terminal and type
rosrun rqt_reconfigure rqt_reconfigure
You’ll see a reconfigure GUI.
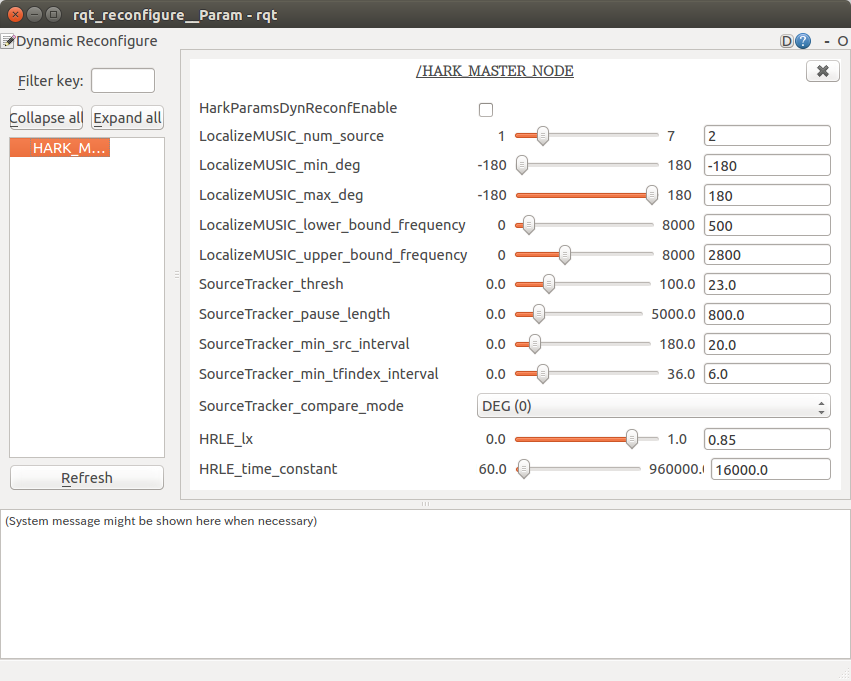
You can modify parameters of LocalizeMUSIC and SourceTracker through this dynamic reconfigure GUI.
Now, let us check how the ROS system sees the HARK network by rqt_graph.
rosrun rqt_graph rqt_graph
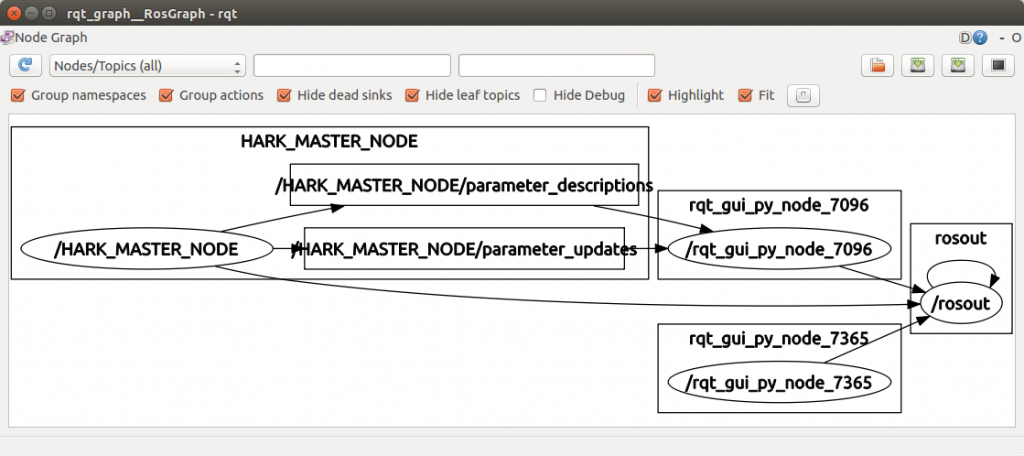
You can see that the HARK_MASTER_NODE node accesses the dynamic reconfigure parameter server.
Also
rostopic list
returns
/HARK_MASTER_NODE/parameter_descriptions /HARK_MASTER_NODE/parameter_updates /rosout /rosout_agg
