HARK-ROS
HARK-ROS provides seamless communication between HARK and ROS.
HARK-ROS Concepts
We provide benefits for both ROS users and HARK users by HARK-ROS.
- For ROS users
- HARK Functionalities on ROS (Not many audio based packages available in ROS at the moment. We provide it.)
-
-
- Audio related message passing
- GUI based network construction
- Frame-based processing
-
- For HARK users
- New functionalities using ROS functions
-
-
- Simultaneous multi HARK network processing with synchronization
- Remote HARK network processing with synchronization
- Dynamically reconfigurable HARK parameters for tuning
- Event-based processing (HARK is frame-based processing)
-
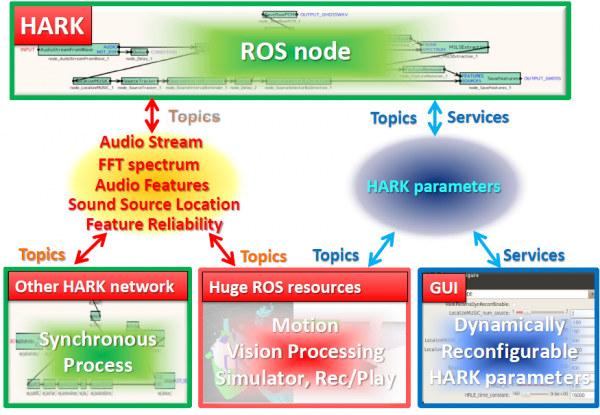
HARK-ROS Functionalities
All the following functionalities are available in HARK
- ROS node generation
- ROS msg Publish/Subscription
- ROS srv Client/Server Request/Response
- Dynamic Reconfigurable parameters
We also provide HARK standard msgs and srvs in order to realize seamless communication between HARK and ROS.
Following are available as ROS topics.
- Audio Stream (HarkWave.msg, HarkSrcWave.msg)
- FFT spectrum (HarkFFT.msg, HarkSrcFFT.msg)
- Sound Source Location (HarkSource.msg)
- Audio Features (HarkFeature.msg, HarkSrcFeature.msg)
- Feature Reliability (HarkSrcFeatureMFM.msg)
Both single and multi channel messages are available for all above message types.
HARK-ROS Installation Instructions
Go to following page.
HARK-ROS Video
HARK has been installed on Texai.
HARK-ROS Tutorials
Go to following page.
