Recording and playing HARK std messages by rosbag
- The purpose of this tutorial is to save and load bag files in HARK.
- This tutorial provides the following two network files.
- HarkWavePublisher.n : Record HarkWave messages to a bag file.
- HarkWaveSaver.n : Receive the HarkWave messages from the bag file and save them as a raw file.
HarkWavePublisher.n
Main Sheet Configuration
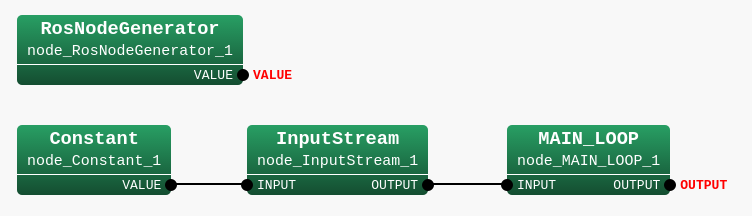
- Required Modules
- RosNodeGenerator
- Constant
- InputStream
- MAIN_LOOP (Same as LOOP0 in the previous tutorials. This appears after you create iterator sheet.)
RosNodeGenerator
All description is available at Publishing/Subscribing msg type Topics.
Constant
All description is available at Application of publishing/subscribing HARK std messages.
InputStream
All description is available at Application of publishing/subscribing HARK std messages.
MAIN_LOOP
All description is available at Application of publishing/subscribing HARK std messages.
Iterator Sheet Configuration
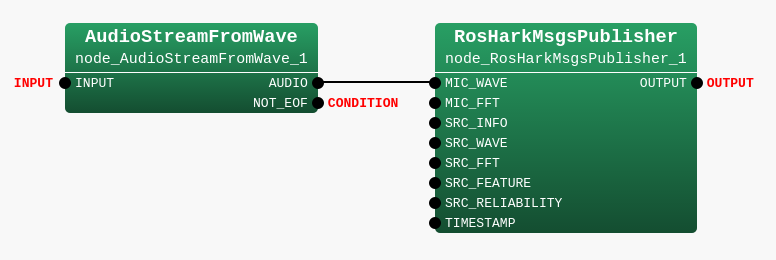
- Required Modules
- AudioStreamFromWave
- RosHarkMsgsPublisher
AudioStreamFromWave
All description is available at Application of publishing/subscribing HARK std messages.
RosHarkMsgsPublisher
All description is available at Application of publishing/subscribing HARK std messages.
Recording HarkWave messages to a bag file
Save the network file before closing [e.g.) HarkWavePublisher.n ]
Open a new terminal and type
roscore
Prepare one recorded wave file for the evaluation (YOUR_WAV.wav).
Go back to the previous terminal and run the HARK network file
./HarkWavePublisher.n YOUR_WAV.wav
Then the topic “/HarkWave” is published.
Open a new terminal and type
rosbag record /HarkWave
You can record the HarkWave message to a bag file.
You will find ***.bag in the current directory.
HarkWaveSaver.n
Main Sheet Configuration
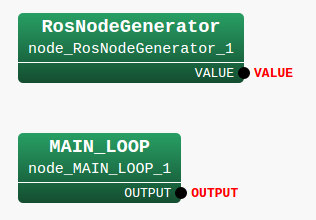
- Required Modules
- RosNodeGenerator
- MAIN_LOOP (Same as LOOP0 in the previous tutorials. This appears after you create iterator sheet.)
RosNodeGenerator
All description is available at Publishing/Subscribing msg type Topics.
MAIN_LOOP
All description is available at Application of publishing/subscribing HARK std messages.
Iterator Sheet Configuration

- Required Modules
- HarkMsgsStreamFromRos
- ChannelSelector
- SaveRawPCM
HarkMsgsStreamFromRos
- Module Description
This module receives one of HarkMsgs and outputs them one-by-one frame-by-frame.
The output NOT_EOF can be the condition for the loop in the network file.
Therefore, this can be used exactly like AudioStreamFromWave.
- Module Location
Node list > HARK:ROS:IO > HarkMsgsStreamFromRos
- Property settings
| Name | Type | Value | Explanation |
|---|---|---|---|
| STREAM_SELECTION | string | HarkWave | subscribed message type |
| TOPIC_NAME_HARKWAVE | string | HarkWave | subscribed topic name |
| ROS_LOOP_RATE | float | 1000000 | ROS loop frequency |
| MSG_BUFFER_NUM | int | 100 | Number of buffers taken by ROS |
| DATA_BUFFER_NUM | int | 100 | Number of buffers taken by HARK |
| KILL_TIME_LEN | int | 900000 | Life duration of the network file for no data reception [usec] |
| KILL_NETWORK | bool | true | Enable kill function for no data reception |
| ENABLE_DEBUG | bool | false | Enable debug print |
ChannelSelector
- Module Description
This module extract the desired channel signals from multichannel wave signal.
- Module Location
Node list > HARK:MISC > ChannelSelector
- Property settings
| Name | Type | Value | Explanation |
|---|---|---|---|
| SELECTOR | object | <Vector<int> 0> | Selection of the channel. Here only channel 0 is selected. |
SaveRawPCM
- Module Description
This module saves the raw signal into a certain sw file.
- Module Location
Node list > HARK:AudioIO > SaveRawPCM
- Property settings
| Name | Type | Value | Explanation |
|---|---|---|---|
| BASENAME | string | sep_ | Base name of the saved file. Here the file name will be “sep_0.sw” “sep_1.sw”… |
| ADVANCE | int | 160 | Shift length |
| BITS | int | 16 | Bit depth of the saved data |
- Terminal settings
Set “OUTPUT” for this output.
Receiving bag file messages and saves them as a wave file
Save the network file before closing [e.g.) HarkWaveSaver.n ]
Open a new terminal and type
roscore
Go back to the previous terminal and run the HARK network file
./HarkWaveSaver.n
Then the network file starts to wait for HarkWave messages.
Open a new terminal and type
rosbag play ***.bag
Here, ***.bag is the bag file you recorded in the previous section.
When the network file receives the HarkWave message from the bag file, it starts to save them as a raw file named “sep_.sw”.
After the bag file is finished, the HARK network file is automatically killed 900000[usec] later.
You will see there is a seved “sep_.sw” in the current directory.
Let’s play “sep_.sw”. Before that we need to convert it to a wave file by the following command.
sox -e signed-integer -c 1 -r 16000 -t sw sep_.sw -t wav sample.wav
Play the sample.wav.
play sample.wav
You may hear the same sound as YOUR_WAV.wav.
